
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 |
Tags
- STL
- C++
- Gas
- 메테리얼
- build.cs
- 언리얼 엔진5 #언리얼 클라이언트 프로그래밍
- 원카페#무인카페#카페추천#카페맛집
- topdownmove
- 헤더 경로
- 오늘밤 세계에서 이 사랑이 사라진다 해도 #독후감 #오열
- c++ 베이직
- 언리얼엔진5 #언리얼 클라이언트 프로그래밍
- Module
- Unreal
- leetcode
- Console
- UE_5
- Harvard
- CS50
- 코드리뷰
- 네트워크 기초
- 폭설 #미친 날씨
- 언리얼
- 툰쉐이딩
- 순환 리스트
- Toon Shading
- 브론즈
- A* Algorithm
- CS
- 백준
Archives
- Today
- Total
WN_인생기록
A* Algorithm -3 본문
앞에 포스트에서 기초 세팅이 끝났으니, Update를 해야한다.(아직 그려진거 없음)
virtual bool OnUserUpdate(float fElaspedTime) {
// 노드의 사이즈와 두께를 정해준다.
int nNodeSize = 9;
int nNodeBorder = 2;
// 마우스 위치를 기반으로, 노드 단위의 위치 식별
int nSelectedNodeX = m_mousePosX / nNodeSize;
int nSelectedNodeY = m_mousePosY / nNodeSize;
// 마우스를 놓으면
if (m_mouse[0].bReleased) {
// 맵의 노드 범위 안에서
if (nSelectedNodeX >= 0 && nSelectedNodeX < nMapWidth) {
if (nSelectedNodeY >= 0 && nSelectedNodeY < nMapHeight) {
// Shift 키 누르고 있으면 -> 시작점 세팅
if (m_keys[VK_SHIFT].bHeld) {
nodeStart = & nodes[nSelectedNodeY * nMapWidth + nSelectedNodeX];
}
// Ctrl 키 누르고 있으면 -> 끝점 세팅
else if (m_keys[VK_CONTROL].bHeld) {
nodeEnd = & nodes[nSelectedNodeY * nMapWidth + nSelectedNodeX];
}
// 그냥 키는 ->장애물 세팅
else {
nodes[nSelectedNodeY * nMapWidth + nSelectedNodeX].bObstacle = !nodes[nSelectedNodeY * nMapWidth + nSelectedNodeX].bObstacle;
}
// 이해를 위해서 AStar 알고리즘은 뒤에서 설명
Solve_AStar();
}
}
}
...

...
// Fill은 특정 길이에서 특정 높이까지 색깔을 채움.
// Path Update ( 노드보다 늦게 만들면 노드 가려짐, draw 순서 중요)
// 먼저 화면을 전부 clear 하게 만듦.
Fill(0, 0, ScreenWidth(), ScreenHeight(), L ' ');
// 전체 노드를 훑으면서
for (int x = 0; x < nMapWidth; x++) {
for (int y = 0; y < nMapHeight; y++) {
// 초기설정때 넣어주었던 vecNeighbours 들 에다가
for (auto n: nodes[y * nMapWidth + x].vecNeighbours) {
// 라인을 그려줌( 노드 사이의 길)
//NodeSize = 한 픽셀의 단위
// NodeSize /2 = 노드의 시작 위치를 노드의 중앙으로 설정
// DrawLine파라미터( x시작점,y시작점,x도착점,y도착점,선 스타일, 선 색상)
DrawLine(x * nNodeSize + nNodeSize / 2, y * nNodeSize + nNodeSize / 2, n - > _x * nNodeSize + nNodeSize / 2, n - > _y * nNodeSize + nNodeSize / 2, PIXEL_HALF, FG_DARK_BLUE);
}
}
}
//draw Node
// 노드 전체 훑어주면서
for (int x = 0; x < nMapWidth; x++) {
for (int y = 0; y < nMapHeight; y++) {
// if obstacle -> color is white.
// 장애물로 체크 된 곳 있으면 white. 아니면 기본 블루
Fill(x * nNodeSize + nNodeBorder, y * nNodeSize + nNodeBorder, (x + 1) * nNodeSize - nNodeBorder, (y + 1) * nNodeSize - nNodeBorder, PIXEL_SOLID, nodes[y * nMapWidth + x].bObstacle ? FG_WHITE : FG_BLUE);
// 방문한 곳은 소라색
if (nodes[y * nMapWidth + x].bVisited) {
Fill(x * nNodeSize + nNodeBorder, y * nNodeSize + nNodeBorder, (x + 1) * nNodeSize - nNodeBorder, (y + 1) * nNodeSize - nNodeBorder, PIXEL_SOLID, FG_CYAN);
}
// 노드 시작점은 초록색
if ( & nodes[y * nMapWidth + x] == nodeStart) {
Fill(x * nNodeSize + nNodeBorder, y * nNodeSize + nNodeBorder, (x + 1) * nNodeSize - nNodeBorder, (y + 1) * nNodeSize - nNodeBorder, PIXEL_SOLID, FG_GREEN);
}
// 노드 도착점은 빨간색
if ( & nodes[y * nMapWidth + x] == nodeEnd) {
Fill(x * nNodeSize + nNodeBorder, y * nNodeSize + nNodeBorder, (x + 1) * nNodeSize - nNodeBorder, (y + 1) * nNodeSize - nNodeBorder, PIXEL_SOLID, FG_RED);
}
}
}
// 노드 역추적해서 경로를 시각화 ( A Star까지 구현하면 코드 적용)
// 노드의 도착점 설정이 되었다면
if (nodeEnd != nullptr) {
// 역추적을 할 노드 p
Node * p = nodeEnd;
// p의 parent가 nullptr이 될때까지
while (p - > parent != nullptr) {
// 라인을 그림 (노란색)
DrawLine(p - > _x * nNodeSize + nNodeSize / 2, p - > _y * nNodeSize + nNodeSize / 2, p - > parent - > _x * nNodeSize + nNodeSize / 2, p - > parent - > _y * nNodeSize + nNodeSize / 2, PIXEL_SOLID, FG_YELLOW);
p = p - > parent;
}
}
return true;
}
이렇게 해 놓으면, 일단
콘솔 화면에 노드와, 길 , 노드의 시작점, 노드의 끝점이 일단 화면에 나온다.
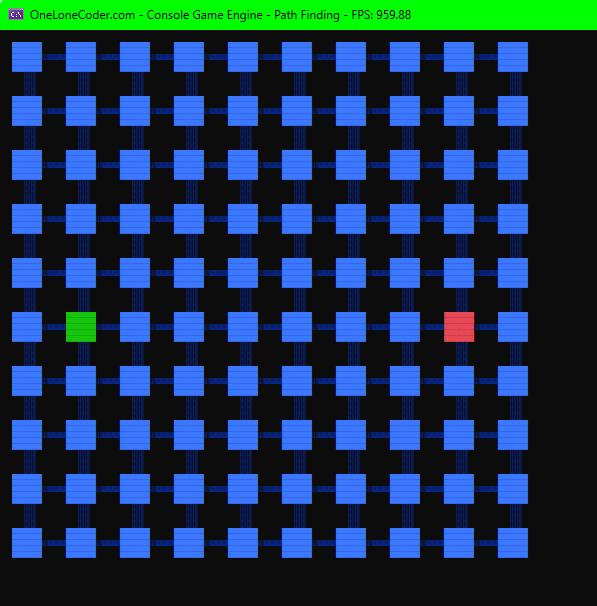
정리하자면, 각 노드에는 방문한곳, 장애물, 시작점, 끝점, 주변 노드 의 데이터가 있고,
update에서 초기화를 먼저 하고, 길, 노드 순으로 그려나가면서 현재 화면이 송출되고 있다.
'C++ > 탐구' 카테고리의 다른 글
| next_permutation (0) | 2024.04.08 |
|---|---|
| A* Algorithm -4 (완) (0) | 2024.04.01 |
| thread (0) | 2024.03.30 |
| Lvalue? Rvalue? (0) | 2024.03.24 |
| While (0) | 2024.03.20 |
'C++/탐구' Related Articles
more
